F1
High-Fidelity Digital Twins
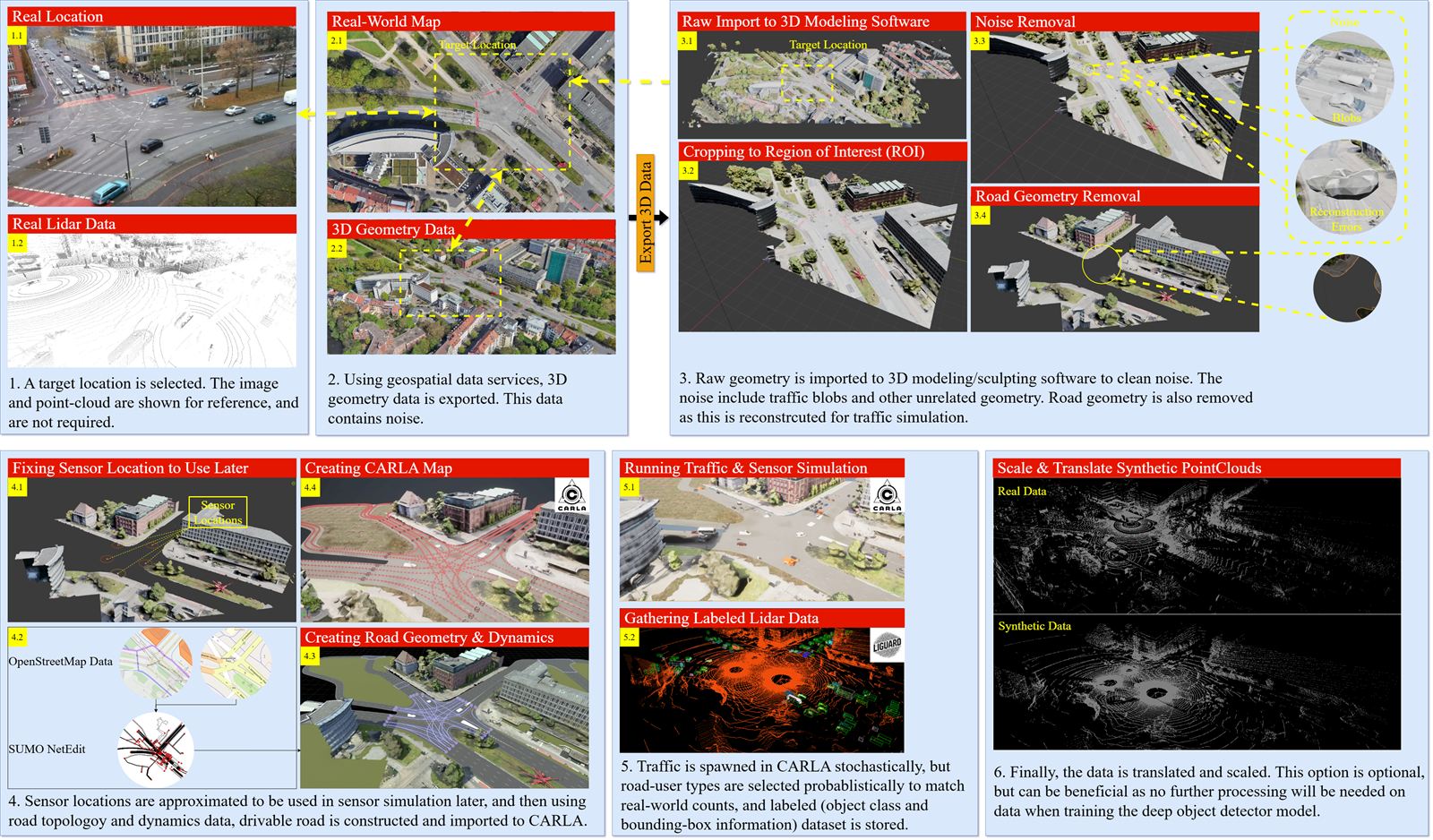
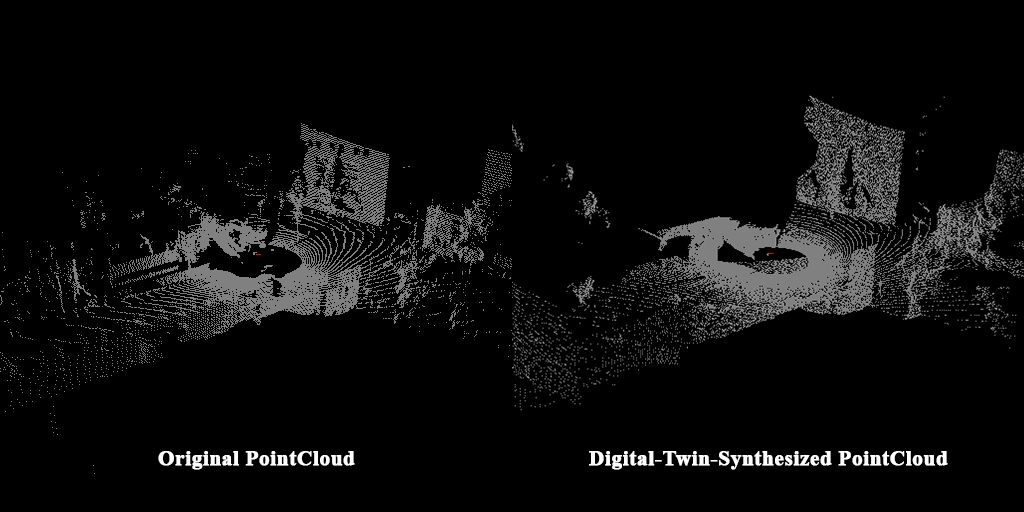
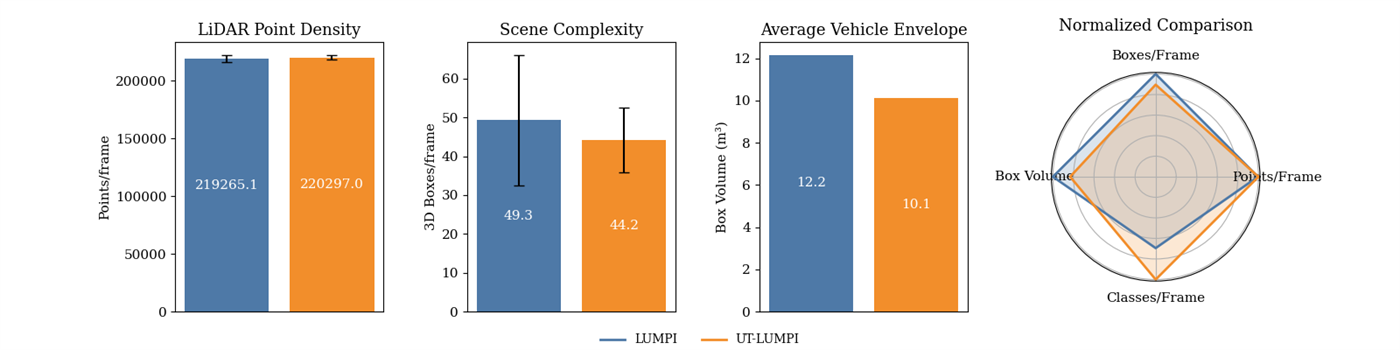
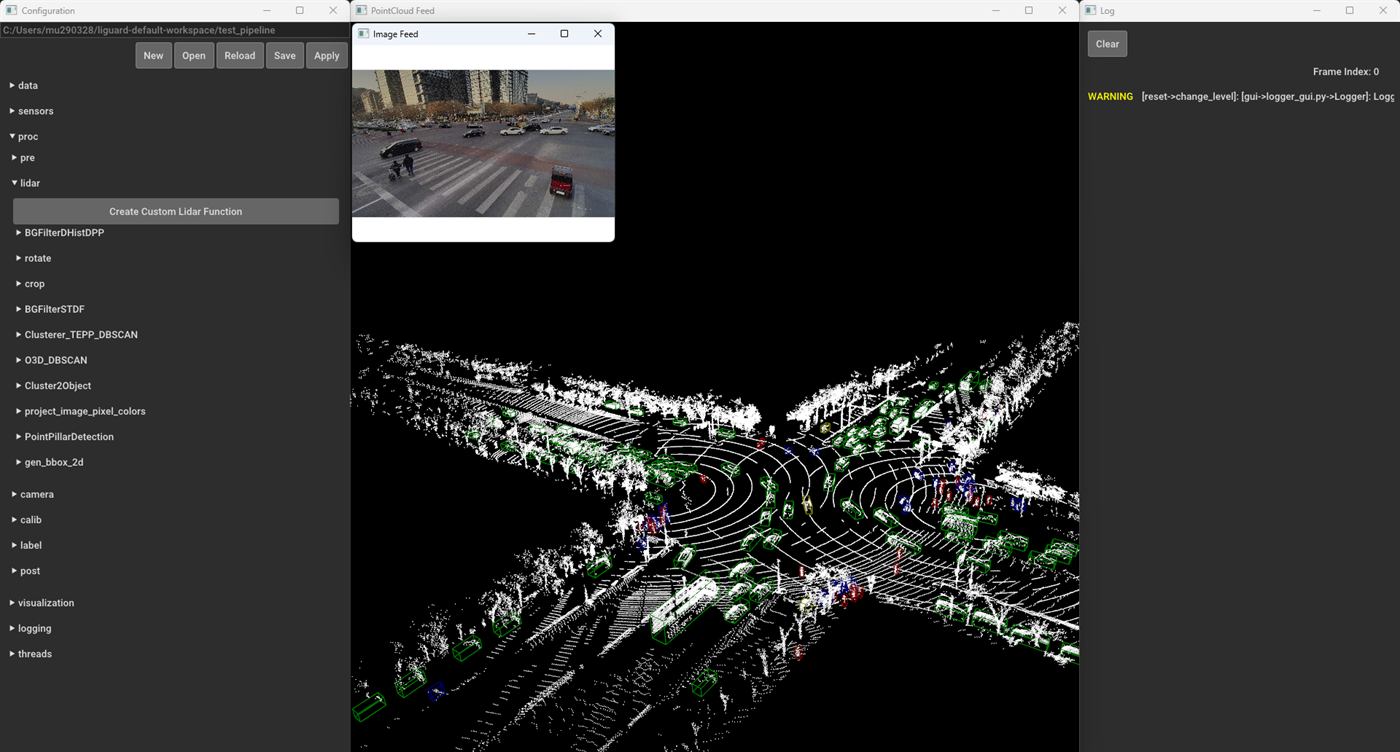
Statistically aligned replicas of real intersections built in Unreal & Matlab RoadRunner. Geometry, materials, traffic flow, and sensor placement are all measured from the source — not guessed. The output is synthetic LiDAR that fools downstream detectors.
- ↳ Provisional patent: Statistically Aligned LiDAR Digital Twin Pipeline
- ↳ Three public synthetic datasets on Harvard Dataverse